
About me
I am a roboticist and AI researcher dedicated to building intelligent systems that learn efficiently and adapt to the complexities of the real world.
Currently, I am a PhD student in Robotics at Carnegie Mellon University within the roBOT Intelligence Group (BIG), advised by Jean Oh. My research focuses on self-supervised learning, specifically developing sample-efficient methods to adapt robotic policies to out-of-distribution (OOD) scenarios.
My work has been featured in top-tier venues, including ICRA, IROS, RSS, ICML, Neurips, RA-L. Along this journey, I have led projects in agentic AI, foundation models for robotics, and HRI; while interning and collaborating with Microsoft, the Munich Institute of Robotics and Machine Intelligence (MIRMI) and CMU.
I have been honored with the Fundação Estudar Leaders Program fellowship (0.05% acceptance rate), the TCS Presidential Fellowship, and the AUCANI Merit Scholarship.
Before CMU, I earned my M.Sc. in Mechatronics and Robotics from TUM, where my thesis on natural-language trajectory steering resulted in first-author publications at IROS and ICRA. I hold a B.Sc. from the University of São Paulo (USP), where I led the Projects Division of Grupo Turing, developed autonomous drones for international competitions, researched distributed sensing systems, and published two papers at ICRA 2021 on autonomous aerial cinematography.
I invite you to check my Portfolio and Publications.
Recent publications:
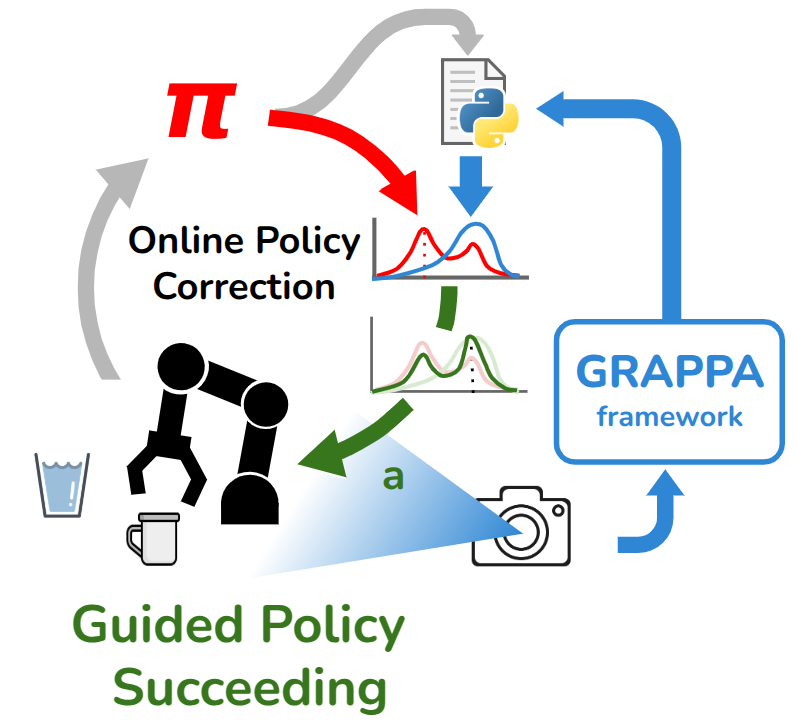
| GRAPPA: Generalizing and Adapting Robot Policies via Online Agentic Guidance Arthur Bucker, Pablo Ortega-Kral, Jonathan Francis, Jean Oh Published in IEEE Robotics and Automation Letter | RSS 2025 Workshop on Semantic Reasoning and Goal Understanding in Robotics |
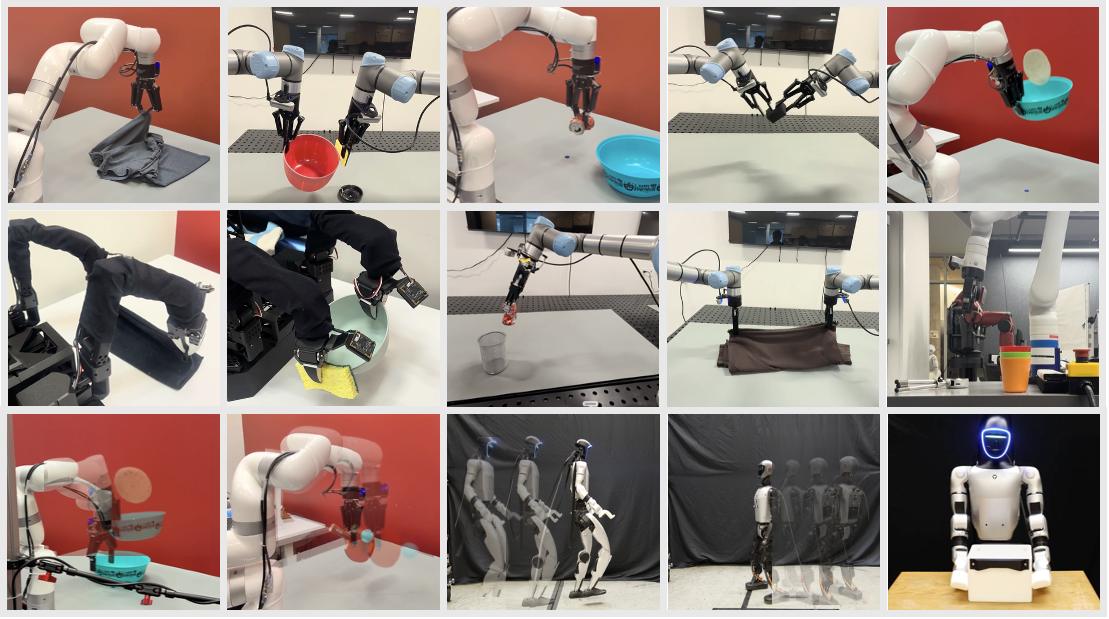
| RIO: Flexible Real-time Robot I/O for Cross-Embodiment Robot Learning Pablo Ortega-Kral*,1, Eliot Xing*,1, Arthur Fender Coelho Bucker1, Vernon Luk1, Jason Kim2, Owen Kwon1, Angchen Xie1, Nikhil Sobanbabu1, Yifu Yuan1, Megan Lee1, Deepam Ameria1, Bhaswanth Ayapilla1, Jaycie Bussell3, Guanya Shi1, Jonathan Francis1,3, Jean Oh1,4,† Published in Preprint - Under review |
| Windows Agent Arena Rogerio Bonatti, Dan Zhao, Francesco Bonacci, Dillon Dupont, Sara Abdali, Yinheng Li, Yadong Lu, Justin Wagle, Kazuhito Koishida, Arthur Bucker, Lawrence Jang, Zack Hui Published in ICML 2025 | Neurips 2024 Workshop on Safe & Trustworthy Agents (SATA) | Neurips 2024 Workshop on Open-World Agents | AAAI 2025 WebAgent workshop |

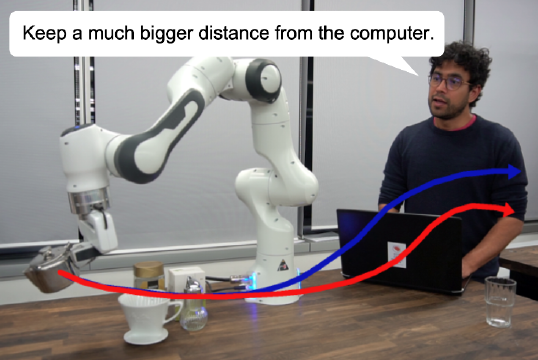
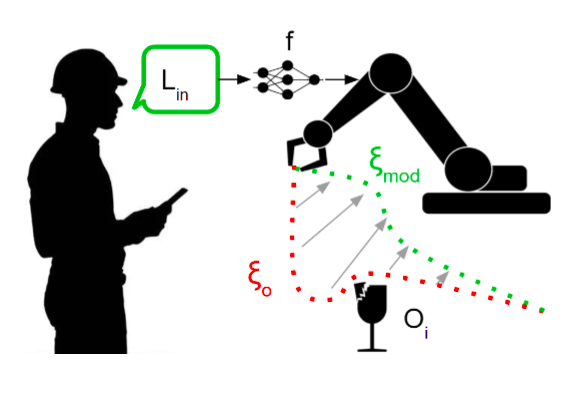
| LATTE: LAnguage Trajectory TransformEr Arthur Bucker, Luis Figueredo, Sami Haddadin, Ashish Kapoor, Shuang Ma, Sai Vemprala, Rogerio Bonatti Published in ICRA2023 | NeurIPS 2022 workshop - Foundation Models for Decision Making |
| ChatGPT for Robotics Sai Vemprala, Rogerio Bonatti, Arthur Bucker and Ashish Kapoor Published in IEEE Access Journal / Microsoft Research Tech Report - feb 2023 |
| Reshaping Robot Trajectories Using Natural Language Commands: A Study of Multi-Modal Data Alignment Using Transformers Arthur Bucker, Luis Figueredo, Sami Haddadin, Ashish Kapoor, Shuang Ma, Rogerio Bonatti Published in IROS 2022 conference | IEEE 2022 ICRA workshop on Shared Autonomy in Physical Human-Robot Interaction | IEEE 2022 ICRA workshop on Collaborative Robots and the Work of the Future | Northwest Robotics Symposium 2022 |
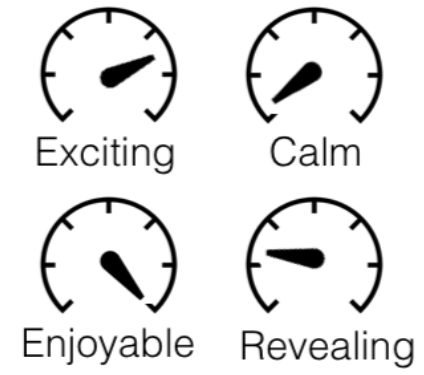
| Batteries, camera, action! Learning a semantic control space for expressive robot cinematography Rogerio Bonatti, Arthur Bucker, Sebastian Scherer, Mustafa Mukadam, Jessica Hodgins Published in IEEE International Conference on Robotics and Automation (ICRA 2021) |
| Do You See What I See? Coordinating Multiple Aerial Cameras for Robot Cinematography Arthur Bucker, Rogerio Bonatti, Sebastian Scherer Published in IEEE International Conference on Robotics and Automation (ICRA 2021) |

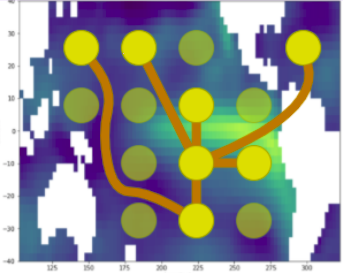
| Graph Neural Networks for Improved El Nino Forecasting Salva Rühling Cachay, Emma Erickson, Arthur Fender C Bucker, Ernest Pokropek, Willa Potosnak, Salomey Osei, Björn Lütjens Published in NeurIPS 2020 workshop on Tackling Climate Change with Machine Learning & EGU2021 (Proposal paper) |
Experience:
Carnegie Mellon University – PhD Candidate
Aug 2023 – Present
roBot Intelligence Group (BIG)
Microsoft - Applied Sciences Group (ASG) — Research Intern
May 2024 – Aug 2024
Research on Autonomous Virtual Agents for windows, contributed to the Windows Agent Arena project, and developed a temporal aware RAG system for Agents
Microsoft - Autonomous Systems and Robotics Research — Research Intern
Jan 2023 – Apr 2023
Research on foundational models for Robotics & Developed an autonomy stack for indoor monocular drones
Koya AI Startup – Machine Learning Researcher
Jul 2023 – Aug 2023
Led the research on foundational models knowledge distillation
MIRMI & Microsoft collaboration – Researcher
Nov 2021 – Nov 2022
Research on HRI using multimodal inputs for motion policy shaping
Carnegie Mellon University Internship – Research Intern
May 2020 – Nov 2020
Robotics Institute Summer Scholar (RISS)
Skyrats – Member
Feb 2018 – Apr 2020
Grupo Turing – Head of Project Management
Feb 2018 – Aug 2018
Grupo Turing is the AI Research group at Escola Politécnica da USP. Its objective is to study, apply, and disseminate AI knowledge.
Cervejaria Ambev – Summer Intern
Jan 2018 – Mar 2018
Education:
Carnegie Mellon University
PhD - Robotics
Aug 2023 – present
Technical University of Munich
Master of Science - Mechatronics and Robotics
Double degree program
2020 – 2022 Thesis pdf
Escola Politécnica da USP
Bachelor’s degree Mechatronics Eng.
2017 – 2023
Colégio Santa Cruz
High School Diploma
2006 – 2016
Extracurricular self-study studies in Electronics, Computing, Neuroscience, Physics and Chemistry
Awards:
- Spotlight contribution - IEEE 2022 ICRA workshop on Collaborative Robots and the Work of the Future
- AUCANI merit scholarship recipient.
- Microsoft AI for Earth Grantee
- Fellow at Fundação Estudar Leaders program (approval rate = 0.05%)
- Summer Exchange in China on the Seeds for the Future program (Huawei)
- 1st place at CLAPP (Latin American Design & Prototype Competition)
- Winning Team at Hackathon Ambev (Hack the World 2017 SP)
- Best project award and Team leader at PACE POLI USP 2017 Competition (1st out of 200 teams)
- A representative of the State of São Paulo at the national stages of the Brazilian Robotics Olympics (team leader 2015 & 2016)
- Silver medal at the national stage of the Theoretical Robotics Olympics (2016)
- Team gold medal at the “International Olympiad Mathématiques sans frontières” (2016).
LANGUAGES
- Portuguese - Native
- English - Fluent
- German - Intermediate
- Spanish - Intermediate
- French - Basic
- Chinese - Basic