| FEB - APR 2023 | Microsof - Airsim Project Demo Objective: Allow real aerial vehicles to execute autonomous navigation in indoor environments, following simulated paths created by generative models. Contribution: - Developed a waypoint based navigation system for indoor drones fusing ORB-SLAM3 and inertial state estimation - Integrated the navigation system with ROS packages and Airsim trajectory plans. - Implemented an user interface to control the drone and visualize the navigation system. Results: - The drone was able to navigate autonomously in a 3D environment, avoiding obstacles and following a pre-defined paths. - The system was deployed and featured in a official Microsoft Demo |

Portfolio
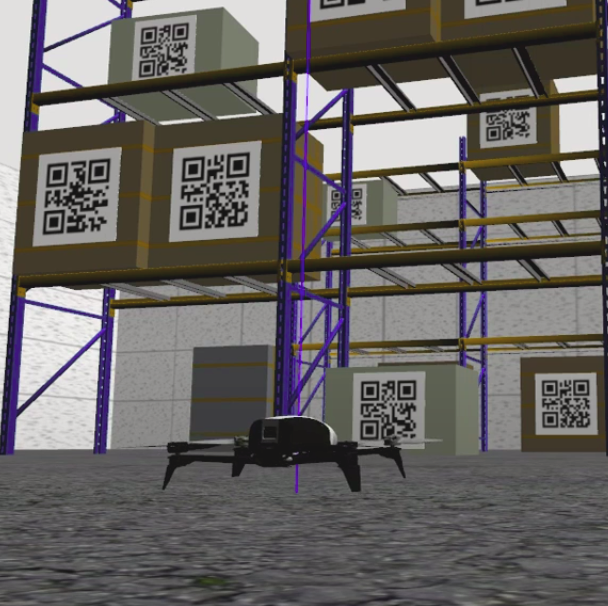
| JAN - SEP 2019 | International Micro Air Vehicles Competition – Madrid Objective: Indoor course: Develop an autonomous micro drone that, under the context of an 4.0 industry, is capable of performing several tasks such as: Autonomously navigate between and through shelves, register the inventory of products, pickup a box and deploy it at a specific spot. Outdoor course: Develop a drone capable of autonomously deliver packages of different sizes, detect rooftops, create two dimensions reconstructed maps. Contribution: - Indoor team Captain - Developed the navigation system for the indoor drone using Monocular ORB SLAM combined with odometry data. - Developed the computer vision and AI solutions for onboard and offboard control. |
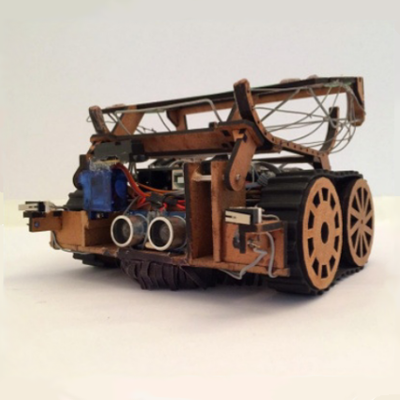
| 2015 - 2016 | Nacional Robotics Olimpiad OBR Objective: Develop an autonomous Arduino-controlled robot, with dimensions smaller than 25x25x25 cm, capable of: follow a broken path; make route decisions based on color signals; dodge obstacles; locate and rescue 5mm diameter spheres. Contribution: - Managed the research and development process in the areas of computing, electronics and mechanics. - Led a team of four team mates during the development period of both competitions (team technical training, deadline management, sponsorship and project promotion) Results: - In both years the robots met the requirements. - In 2016, we held the 1st position (among 40 teams) in the state of São Paulo competition stage. - In 2015 and 2016 we received the award for best private school team in the state of São Paulo. - The team represented the state of São Paulo in Uberlândia (2015) and Recife (2016) |
| OCT 2018 - MAY 2019 | Hydro-acoustic localization system for Divers Partnership between USP and Aalto University (Finland). Budget: €10.000 sponsored by SAAB. Objective: Create an underwater localization and communication system to support technical divers in activities requiring self-localization. Contribution: - Technical Leadership - Responsible for the electronic design - Development of the communication and localization embedded software. Results: - Successfully tested proving the concept of data transmission and acoustic triangulation using frequency-modulated acoustic waves and multi-frequency interferometry. - The project was the cover of the Finnish magazine “Metallitekniikka” |

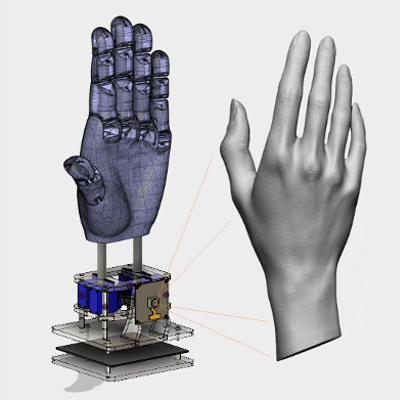
| FEB - MAR 2018 | Robotic Hand Objective: Develop a 3D printed robotic hand capable of mimic the amount of fingers of a captured image, displayed in front of it. Contribution: - Developed the mechanical design. - Coordinated the elaboration of the software Results: - The algorithm used (Convolutional Neural Network) correctly classified the number of fingers in 95% of the test dataset. - Correctly copied the number of fingers presented in front of camera in a time less than 200ms. |
| AUG 2018 - MAR 2020 | Internet of Turtles - Distributed traking System The project is being developed in a partnership with project Tamar. Objective: Apply concepts of distributed networks and swarm intelligence in low-cost embedded systems for sea turtle life monitoring and organic sensing. Contribution: - Responsable for creating the concept of the solution - Implemneted 2 simulators to validate the concept - Developed of embedded eletronic, sofware system and web tracking interface Results: - The system was validated in simulation. - The communication system was validated in real experiments - The system was deployed in real turtle in a controlled environment |

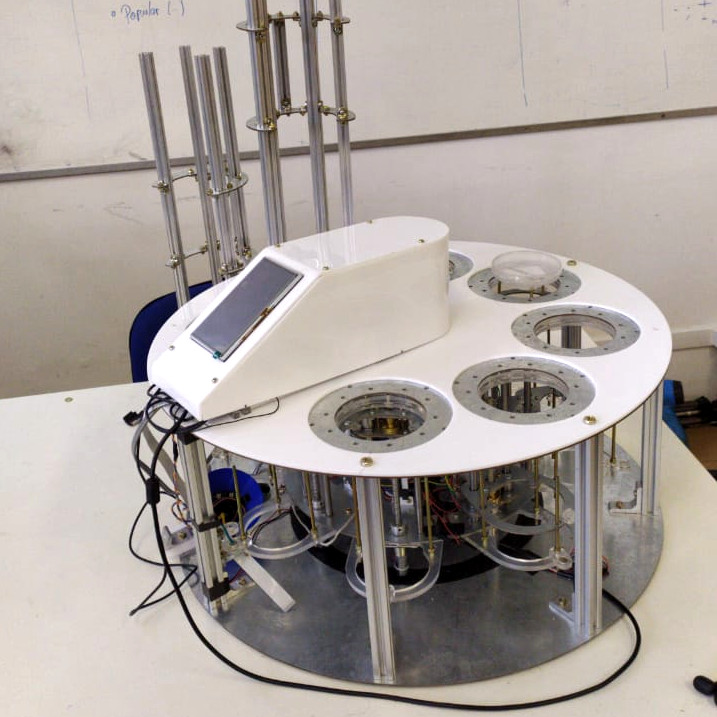
| DEC 2019 - JAN 2020 | Bacterial cultures classifier and separator machine In partnership with Fleury Laboratory Objective: Build a semi-industrial machine that automatizes the process of separating and classifying petri dishes with bacterial cultures, according to the bacterial growing state. Contribution: - Petri dishes barcode reader - Classification algorithm (data enhancement + preprocessing + CNN) Results: The classification algorithm was able to perform well even under limited available training data (dataset with 79 images and 4 classes). The maximum accuracy was of 97.7% on the trainset and 94.7% on testset. |
| MAY - JUN 2017 | Sprinter Line Follower Objective: Design and build an Arduino based line-following cart capable of, when an obstacle in the way is detected, make a sudden and precise braking and stop less than 5 cm from the object. Contribution: - Led a team of six in project execution - Subdivided the team in three development areas: mechanics, control and sensing. - Led the process of capturing the team's technical knowledge. - Integrated results produced by the areas Results: - Met all requirements - The project held the 1st place in the competition (out of 11 teams) |

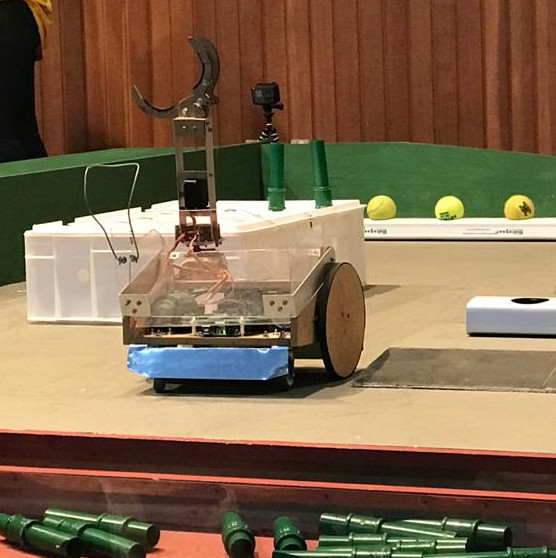
| DEC 2019 | Projects and Prototypes Latin American Competition (CLAPP) Objective: Design and Build a Radio Controlled Robot for cucumbers and lettuces picking in Vertical Farms using “raw materials“ and “basic manufacture techniques”. Team of 3 interdisciplinary students from Brazil, Argentina and Peru Results: First Place at the competition |
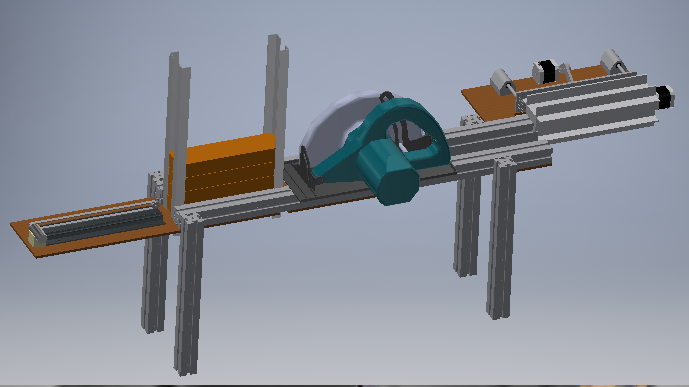
| DEC 2019 | Smuggled cigarettes destroyer machine Partnership with brazilian federal police Objective: Design and prototype a machine to destroy large volumes of smuggled cigarettes seized by the brazilian federal police. Contribution: - mechanical and electronic design |
| MAR - JUL 2017 | Mechanical Automaton - PACE poli competion Objective: Model, simulate and produce a mechanical automaton design. Designed in CAD / CAM software NX10.0 and manufactured with 2 laser cutted 3mm and 6mm MDF boards. The mechanism should be able to be continuously moved by only one torque source. Contribution: - Led and oriented a team of 4 people in the development of the project. - Designed the mechanisms and visual of the project. - Integrated the mechanical elements. Results: - The project met the requirements - We won the best project award in 2017 (out of 200 teams) |

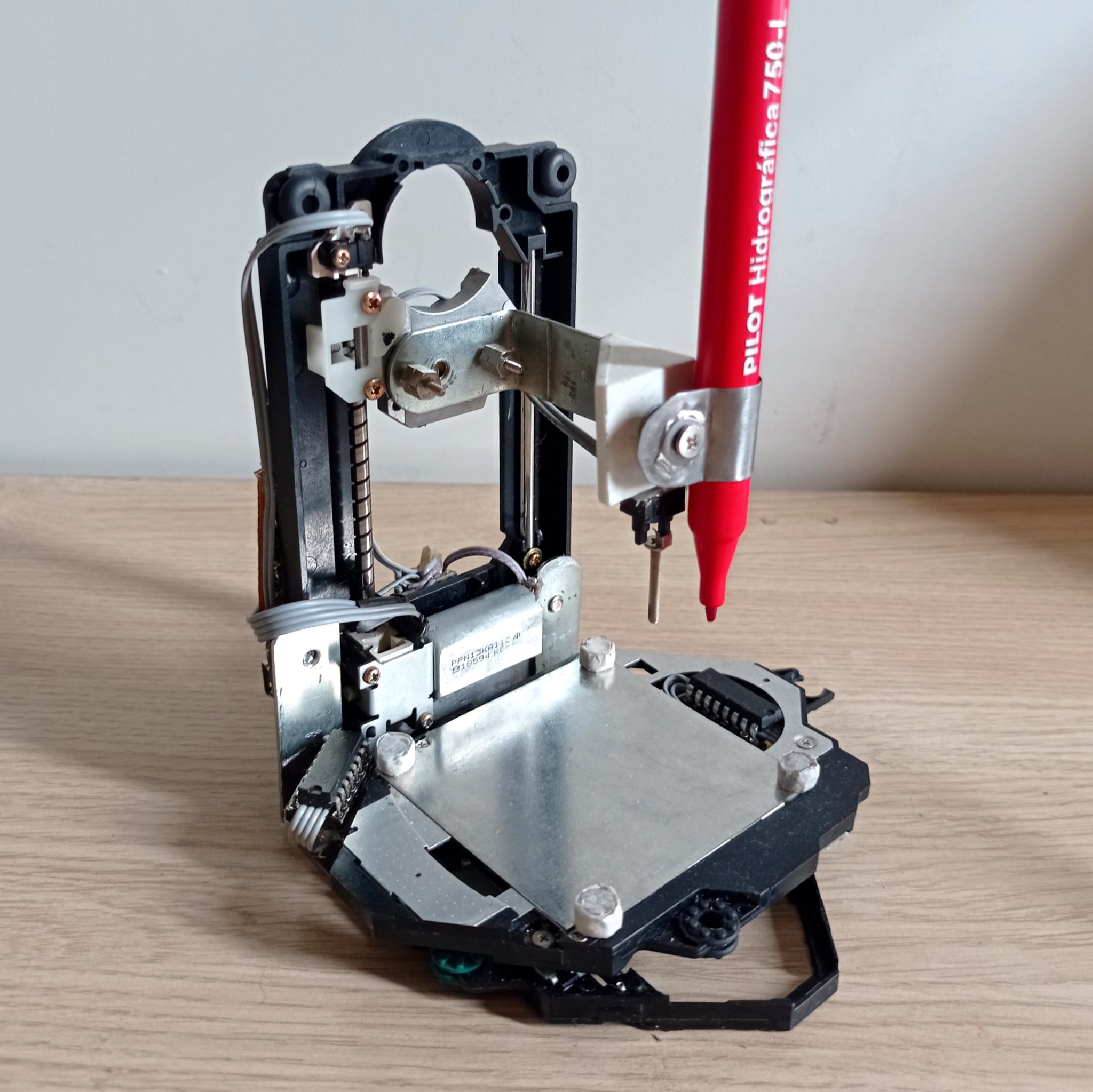
| SEP 2021 | mini plotter Built a mini USB plotter with spare DVD parts for quick PCB marking and etching |
| SEP 2018 | 3D Printer Built a 3D printer with 0.1mm precision and 26 x 26 x 28 cm of usable area, with a budget restricted to $80,00 (USD). |
| from 14 to 16 years old | Other projects Smaller projects developed between the ages of 14 and 16 years old |
