
Robotic Hand
Project time frame: 3 weeks (February 2018 - March 2018)
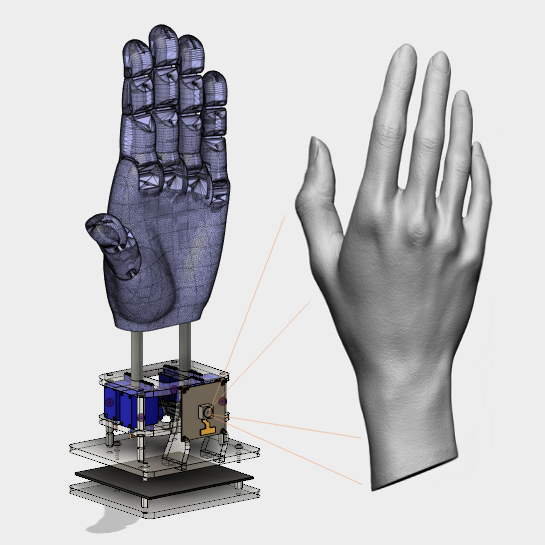
Objective:
Develop a 3D printed robotic hand capable of mimic the amount of fingers of a captured image, displayed in front of it.
My contribution:
- Developed the mechanical design
- Coordinated the elaboration of the software
Results:
- The algorithm used (Convolutional Neural Network) correctly classified the number of fingers in 95% of the test dataset.
- Correctly copied the number of fingers presented in front of camera in a time less than 200ms.
